
Asynchronous Pipeline Comparisons
The first design style, bundled-data pipelines, uses a single-rail synchronous datapath with recently proposed true-four-phase controllers integrated with data-dependent delay lines. The design achieves reasonably-high average performance and very low energy but requires significant design effort to verify the two-sided timing constraints (set-up and hold) typical of bundled-data pipelines. The second design style, 2-D QDI pipelines, consists of a network of small communicating cells communicating through delay-insensitive 1-of-N encoded channels. Compared to the bundled-data counterpart, transistor-level simulations show that all QDI designs achieve higher throughput at the cost of larger area and energy and in particular have 22% better Eτ2 metric. In addition, the QDI designs require less design effort than the bundled-data counterpart, because they require virtually no timing verification.
Bundled-data pipelines
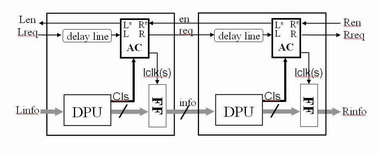
The bundled-data pipelines or micropipelines, uses a single-rail synchronous datapath with asynchronous controllers driving novel speculative delay lines, yielding low area, good average performance, and low power. The cost of this design style, however, is the significant increase in effort and risk associated with verifying all the setup and hold constraints typical of bundled-data design.
QDI fine-grain 2-D pipelines
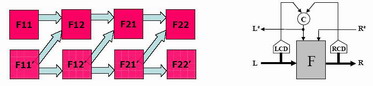
The quasi-delay-insensitive (QDI) fine-grain 2-D pipelines, has the advantages of robustness and high throughput. In this design style, large functional blocks are decomposed into small communicating cells communicating through asynchronous channels. The cells are implemented using the QDI design style which means they will work correctly regardless of wire delays except for very loose timing assumptions on some internal wire forks. The asynchronous channels use 1-of-N rail signaling providing delay-insensitive communication. The cells are arranged in a so-called 2-D pipeline that facilitates very high-throughput independent of the width of the datapath. The costs associate with this design style compared to other asynchronous styles is generally more area and higher absolute power consumption.
Matrix-vector multiplication in the DCTs
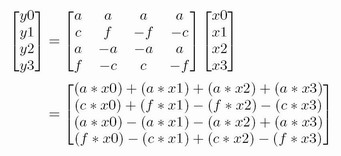
Our matrix-vector multiplier is iterative. In each iteration, it performs four multiply-accumulate computations on constant coefficients and input vectors X in order to generate one output vector Y . In particular, the calculation is shown above where a, c, and f are constant matrix coefficients.
Publications
- An asynchronous pipeline comparisons with application to DCT matrix-vector multiplication, S. Tugsinavisut, S. Jirayucharoensak and P.A. Beerel, ISCAS'03, May. 2003.
- Efficient Asynchronous Bundled-Data Pipelines for DCT Matrix-Vector Multiplication, IEEE Transactions on VLSI Systems, vol. 3, no. 4., pp. 448-461, April 2005.
Acknowledgements
Please contact me at This email address is being protected from spambots. You need JavaScript enabled to view it. if you have any suggestions or questions.